

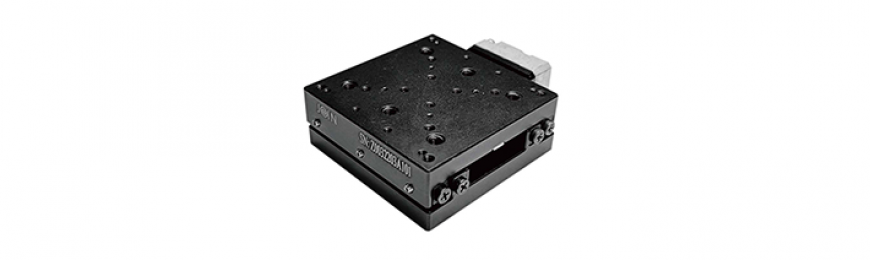
纳米位移台日常养护规范、闲置保管要点与故障提前预判方法
纳米位移台集成精密传感元件、柔性铰链结构与驱动控制系统,零部件加工精度严苛,无明显磕碰痕迹的不当操作,也会加速内部结构老化损耗,逐步出现操控失灵、精度逐年衰减等故障。建立常态化巡检与分级养护制度,明确使用禁忌,可有效延长设备使用周期,减少非必要维修停机。
严守操作禁忌,杜绝人为硬性损伤。禁止徒手外...

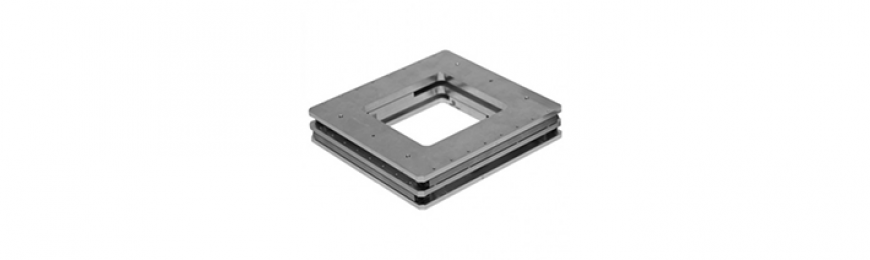
纳米位移台动态运行抖动、定位重复性变差诱因与标准化管控方案
纳米位移台作为光学对准、微纳光刻、微观样品表征领域的核心精密承载部件,依托微动驱动实现高精度点位调控,设备整体机械结构紧凑、传动间隙极小,对使用环境、装夹方式、运行设置十分敏感。实际应用中频繁出现的定点抖动、往返走位不一致、长时间观测零点漂移等现象,大多不是设备硬件出现不可逆损坏,而是现场使用条...
纳米位移台日常操作禁忌与系统化长效运维养护要点
纳米位移台属于超精密微动设备,内部驱动组件、柔性铰链、传感检测结构精度等级极高,结构脆弱、容错率极低,无明显损伤痕迹的不当操作,都会持续损耗设备精度,缩短设备使用寿命。多数设备后期出现的卡顿、响应异常、精度衰减、控制报错等问题,均源于长期不规范操作与养护缺失,建立系统化日常运维机制,是保障设备长...

纳米位移台定位漂移、重复精度差的成因与标准化解决方法
纳米位移台是微纳加工、光学对位、精密检测、微观表征领域的核心精密运动部件,依靠超高分辨率位移控制,实现亚微米至纳米级的精准定位,是保障精密实验与高精度工艺稳定性的关键设备。相较于传统传动位移机构,纳米位移台对操作方式、负载状态、环境条件和校准精度极度敏感,日常使用中频繁出现的定位漂移、重复精度不...
纳米位移台常见定位异常与故障排查运维方案
长期连续运行中,纳米位移台易出现定位漂移、重复精度差、运动卡顿、响应滞后、控制报错等问题,大多与环境、洁净度、负载方式或校准状态相关,可通过标准化排查与运维快速恢复精度。
一、定位漂移与重复精度下降
表现:每次复位后位置不一致,长期运行偏差逐渐变大。
常见原因:
环境温度波动导致台体微形变
长期偏载、...

纳米位移台日常操作规范与高精度稳定运行要点
纳米位移台是实现纳米至亚纳米级精密定位的核心设备,广泛用于半导体对位、光学调谐、微观检测与微纳装配等场景。因其对环境、负载与操作细节高度敏感,日常操作是否规范,直接决定定位精度与长期稳定性。
开机前准备是避免早期故障的关键。先确认台面水平稳固、无震动干扰,周边无强气流与温度突变;检查线缆连接完好、...