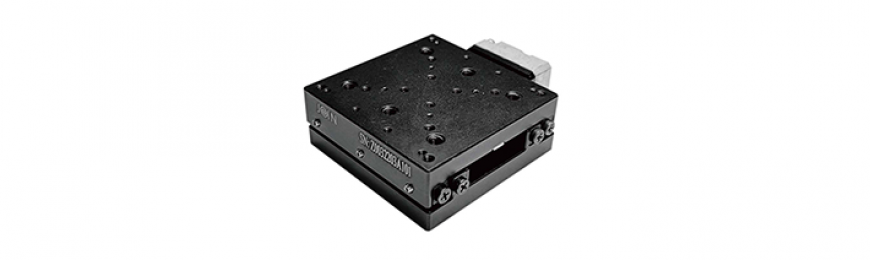

纳米位移台校准误差的常见来源
纳米位移台在高精度应用中,校准误差的来源十分复杂,通常由机械结构、传感器特性、控制算法及环境因素等多方面共同作用造成。了解这些误差来源,有助于针对性地优化系统设计与使用条件。以下是常见的误差来源分析。
一、机械结构误差
纳米位移台的导轨、驱动单元及安装底座存在微小制造与装配误差。
导轨平面度和直线度...
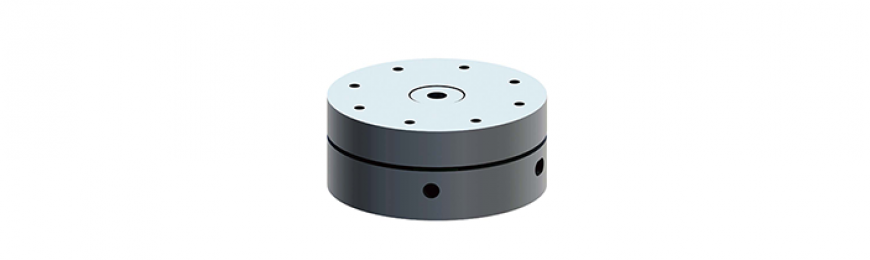
纳米位移台在倾斜安装时的影响
纳米位移台在倾斜安装时会对其性能和精度产生一定影响,因此需要在设计和使用中谨慎考虑。一般来说,纳米位移台是为水平安装优化的,当安装角度发生变化时,会引入重力分量、摩擦变化以及结构受力偏差等问题。以下是主要影响与建议:
一、运动精度下降
倾斜安装会使重力分量作用于驱动方向,尤其在垂直或大角度倾斜时,...
纳米位移台微调按钮如何使用
纳米位移台的微调按钮是用来进行精细位移调整的工具,适合在粗调完成后进行高精度定位。使用方法和注意事项如下:
一、功能概述
微调按钮通常用于控制纳米位移台沿某个方向做微小移动,步长很小,可以精确到纳米级或亚微米级。它通常配合显示屏或控制软件,实时显示位移量。
二、使用步骤
粗调定位
先使用手动操作或粗调...

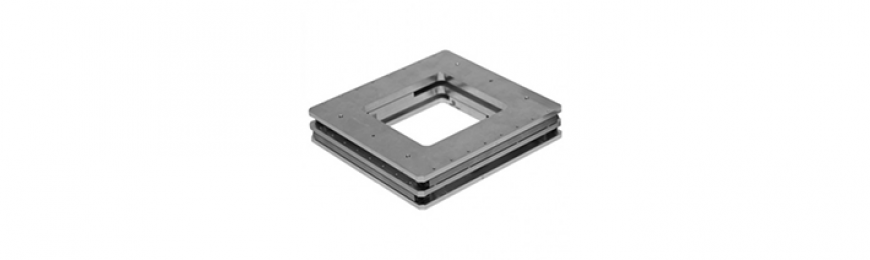
纳米位移台如何清理滑轨
清理纳米位移台滑轨时需要非常小心,因为滑轨直接影响位移台的精度和寿命。操作步骤和注意事项如下:
一、准备工作
断电:确保位移台及控制器完全断电,避免意外运动造成损伤。
清洁环境:在无尘或低尘环境下进行,避免灰尘再次污染滑轨。
工具和材料:准备柔软无绒布、棉签、专用无水酒精或电子级清洁剂,以及少量适合...

纳米位移台使用前要预热吗
纳米位移台在正式使用前通常建议进行预热,尤其是高精度测量或长时间运行的实验。预热的主要目的是让系统在温度、机械和电气方面达到稳定状态,从而提高定位精度和重复性。以下是详细说明:
1. 预热的必要性
纳米位移台在工作过程中,其驱动器、传感器和控制电子元件都会产生一定热量。如果直接使用冷态设备,温度上升过...

纳米位移台位移范围怎么看
纳米位移台的位移范围是衡量其最大运动能力的关键指标,一般用“最大行程”或“移动范围”来表示,通常单位为微米(µm)或毫米(mm)。要查看或确定纳米位移台的实际位移范围,可以从以下几个方面入手:
1. 查看设备铭牌或技术参数表
最直接的方法是查看提供的技术资料。
在设备铭牌、产品说明书或技术参数表中,通常会标明...
纳米位移台控制器不响应怎么办
如果纳米位移台控制器不响应,可以按以下步骤排查和处理:
1. 检查电源
确认控制器和位移台是否接通电源,电源指示灯是否正常。
检查电源电压是否符合设备要求。
2. 检查连接线
确认控制器与位移台、电脑或上位机的连接线是否牢固、接口是否接触良好。
如果是 USB、以太网或串口连接,可以尝试更换线缆或接口。
3. 检查...

纳米位移台负载太重怎么办
纳米位移台如果负载过重,会导致运动精度下降、速度降低,甚至可能损坏驱动器或减小使用寿命。处理方法主要有以下几种:
1. 降低负载
尽量减轻安装在位移台上的质量,包括实验夹具、样品或探测器。可以使用更轻的材料或者拆除非必要的附加部件。
2. 选择适配的位移台型号
每台纳米位移台都有额定负载范围,如果现有负载...
纳米位移台启动后不响应怎么办
纳米位移台启动后不响应是实验中较常见的问题之一,通常涉及电气连接、控制系统或机械部分的异常。可以从以下几个方面逐步排查和解决:
检查电源与连接
首先确认位移台电源是否正常开启,供电电压是否稳定。如果电源灯不亮或控制器无响应,可能是电源线松动、保险丝熔断或供电模块故障。还要确保控制信号线、反馈传感器...
纳米位移台数据不稳定的原因
纳米位移台数据不稳定是一个常见的性能问题,通常表现为位移读数波动、重复性差或信号噪声明显。造成这种现象的原因较多,既可能来自环境,也可能源于控制系统或机械结构。以下是主要原因分析与思路:
环境干扰
外部环境对纳米级运动控制影响非常明显。温度变化会引起材料的热膨胀或收缩,从而造成位移读数漂移;空气流...