
真空工况纳米位移台线缆污染、线路信号异常排查维护方法
适配真空腔体使用的纳米位移台配套专用低释气屏蔽线缆,线缆长期在负压、高温环境下工作,极易出现绝缘层析出杂质、接头信号接触不良、线路磨损等问题,引发位移数值跳变、运动失控、控制器报错等故障,不同品牌型号纳米位移台真空线缆耐温、低出气等级、耐磨防护工艺参数性能不同,故障排查与标准化维护流程如下。
腔体...

纳米位移台运行时温度漂移过大,定位精度失准优化方案
纳米位移台依靠压电陶瓷与柔性铰链实现纳米级精准运动,温度变化会引发陶瓷形变、铰链热胀冷缩,进而产生持续坐标漂移,直接影响对位、扫描、微加工等工序的成品精度,不同品牌型号纳米位移台温度补偿算法、材质热膨胀系数、闭环反馈响应速度参数性能不同,漂移抑制效果存在明显差距,可从设备调试、工况管控、硬件防护...
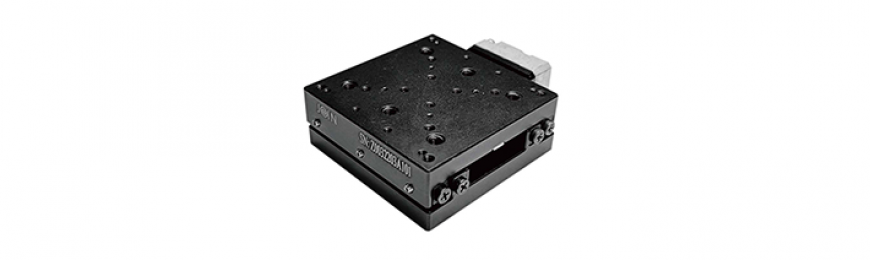
纳米位移台适配真空腔体安装调试完整操作流程
真空加工、真空观测设备内部配套的纳米位移台有专属安装与调试要求,普通大气款台面无法直接投入负压腔体使用,不同品牌型号参数性能不同,低释气工艺、线缆耐真空规格、内部密封处理标准各有区分,完整操作分为预处理、装配、真空适配调试三大环节。
一、装配前预处理工序
取出位移台后,拆除表面保护塑料、泡沫、普通...

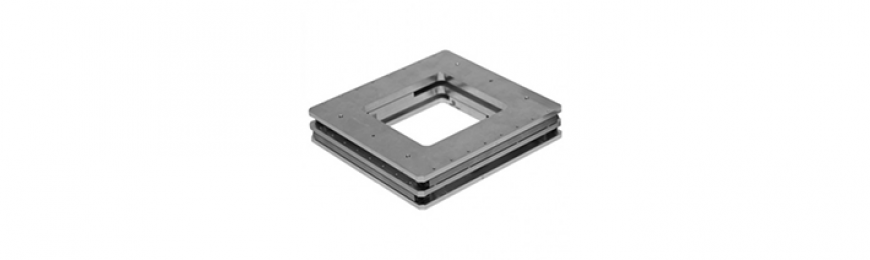
纳米位移台负载搭配规范与超重负载引发的各类故障处理
纳米位移台依靠压电陶瓷与柔性铰链实现纳米级微量移动,台面承载重量直接影响定位精度、运行稳定性与设备使用寿命,不同品牌型号参数性能不同,额定承载上限、抗形变能力、铰链刚性存在明显差异,负载搭配需严格遵循规范。
台面放置工件时,总重量不得超过设备标定额定负载,长期超重运行会带来多重负面问题。其一,柔性...

怎么判断纳米位移台重复定位精度是否达标
重复定位精度是衡量纳米位移台品质的关键指标,加工、对位工序对数值要求严苛,不同品牌型号参数性能不同,出厂标定精度区间各有区别,现场简易检测方法如下。
将位移台移动至指定坐标点位,记录当前设备读数,回零后再次重复移动到同一坐标,连续往复十次,记录每次实际反馈位置数值。
统计多次定位后的坐标差值,该差...

纳米位移台运动过程产生过冲抖动如何处理
纳米位移台在快速启停、短距离往复移动时容易出现台面抖动、位置过冲,导致对位不准、扫描图像拼接错位,不同品牌型号参数性能不同,驱动响应、阻尼特性存在差异,可按以下方式调整改善。
合理调节控制器运动缓冲参数,加大启动与停止缓冲时长,减缓压电陶瓷电压升降速度,避免电压突变带来的台面冲击,大幅减弱过冲幅度...